MASCOT - Maritime Autonomous Sampling and Control
Vision:
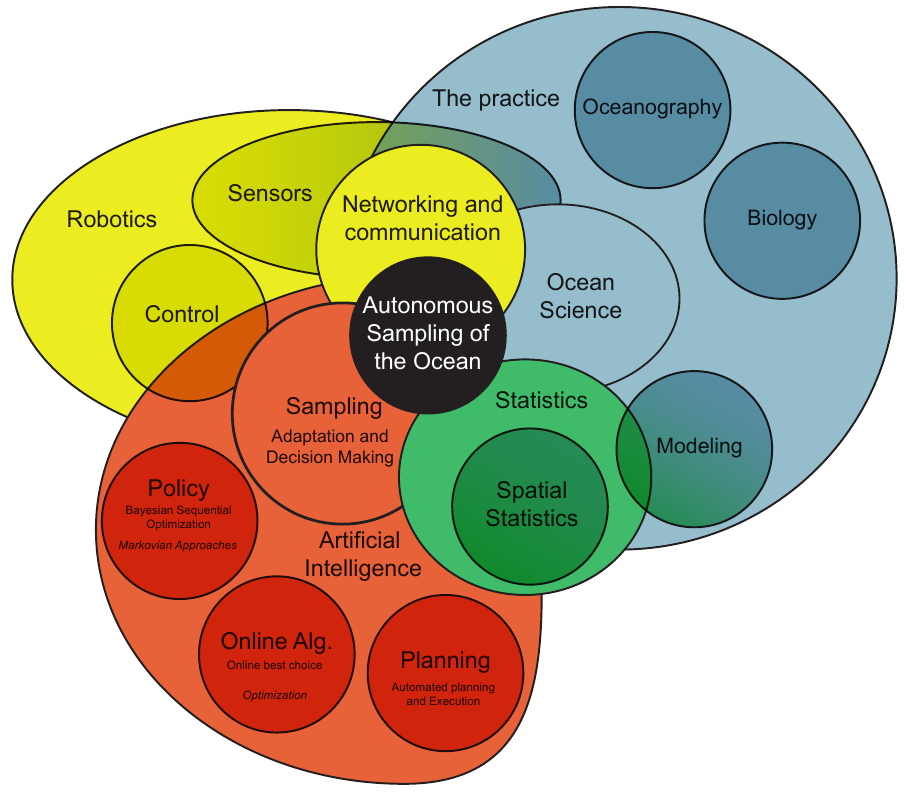
MASCOT is an inter-disciplinary project to build on the science of statistical sampling for oceanographic applications with autonomous robots. Sampling refers to the design of observational strategies in spatio-temporal domains, enabling autonomous platforms to decide on a strategy of where and when to make measurements to increase our knowledge of dynamic environments like the upper water-column. While the project's focus is on methodological development of algorithms, we will leverage complex oceanographic models on shore to build statistical models and generate a strategy for sampling, and embed these onboard autonomous marine vehicles, validating the theory while impacting the science of oceanography.
Primary Objectives:
- using physics-based data to develop realistic spatio-temporal statistical models and methods for environmental sampling using recent advances in computational and spatial statistics
- advancing embedded decision-making using these scalable methods onboard autonomous robotic vehicles
- building up a cohort of young researchers who will look at problem-solving methods in novel inter-disciplinary ways, with modern computational methods, for generating new knowledge of our environment with direct impact to policy making, society and education
The project aims to address parts of the problems related to a pressing need for designing, implementing and testing algorithms for efficient sampling of the upper water-column, and to have the broader impact of commingling methods in statistics, oceanography and automated control including Artificial Intelligence (AI) for adaptive sampling.

Partners:
NTNU, SINTEF Ocean, University of Porto (Underwater systems and Technology Laboratory).
The project is funded by the Norwegian Research Council.